人形机器人进厂“实习” 从产线助手到具身智能的漫长征途

当人形机器人走进工厂车间,穿上工装、拿起工具,开始它们的“实习”生涯,一幅未来制造业的图景正从科幻走向现实。这不仅标志着机器人技术从专用机械臂向通用形态的跃迁,更引发了行业对“具身智能”——即拥有身体并能在物理世界中自主感知、学习和行动的智能——何时到来的深度思考。
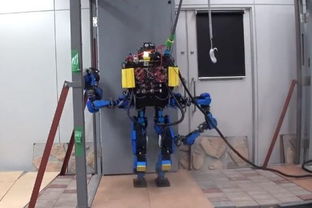
当前,人形机器人进厂“实习”主要集中在相对结构化、流程清晰的场景,如物料搬运、简单装配、质检巡检等。它们依靠高精度传感器、预先编程的轨迹规划和强大的运动控制系统,执行重复性高、劳动强度大的任务。特斯拉的Optimus、波士顿动力的Atlas、国内优必选的Walker等代表性机器人,已展示了行走、抓取、上下楼梯等基础移动与操作能力,其背后是机械设计、驱动技术、运动控制与计算机视觉等多领域技术的融合突破。
从“能执行预设程序”到“拥有真正的智能”,横亘着一道名为“具身智能”的鸿沟。具身智能的核心在于,智能并非孤立于计算芯片中,而是通过与物理环境的持续交互、感知与反馈来形成和演进。它要求机器人能够理解模糊的指令(如“把那边收拾一下”),适应动态变化的环境(如突然出现的障碍物),并从经验中学习新的技能(如通过试错学会打开一种从未见过的门把手)。
实现这一目标面临多重挑战:首先是感知与理解的复杂性。车间环境虽相对规整,但仍有光线变化、物体遮挡、未知物体出现等不确定性。机器人需要更强大的多模态感知(视觉、触觉、力觉等融合)和场景理解能力,以建立对环境的准确“心理模型”。
其次是决策与学习的困难。当前的工业机器人大多依赖精确的离线编程或示教。而具身智能需要机器人能进行在线规划、因果推理,并能从少量演示或自主探索中高效学习。这涉及强化学习、模仿学习、大模型等AI技术与机器人控制技术的深度融合。将大语言模型(LLM)或视觉语言模型(VLM)接入机器人,使其能理解自然语言指令并分解任务,是一条备受关注的技术路径,但如何将抽象的“知识”转化为稳定、安全的物理动作,仍是巨大难题。
再者是硬件与成本的制约。具身智能需要高度灵巧、耐用的仿生肢体(如多指灵巧手),强大且节能的驱动器,以及遍布全身的感知皮肤。这些硬件目前成本高昂,可靠性和续航能力也有待提升。
最后是安全与伦理的考量。拥有更高自主性的机器人如何在复杂环境中确保人机协作的安全?其决策过程是否透明、可解释?这些都是产业化前必须解答的问题。
人形机器人走向真正的具身智能将是一个渐进式的过程,而非一蹴而就的突破。短期内,我们将在更多工厂看到它们作为“超级工具”,在特定工位上发挥价值,其智能将体现在更柔性的任务切换和更易用的编程方式上。中期内,随着AI模型、传感器和算力的进步,机器人将具备在非结构化环境中执行多步骤复合任务的能力,例如独立完成整个小部件的装配流程。长远来看,当机器人的感知、认知、决策与行动形成一个高效、自主的闭环,并能通过与世界和人类的交互不断进化时,或许才是具身智能真正到来的时刻。
这条道路需要机器人学、人工智能、材料科学、认知科学等多学科的持续深耕与交叉创新。人形机器人的“工厂实习”,正是这场漫长征程中坚实而令人期待的第一步。它不仅是技术的试炼场,更是智能形态从虚拟走向实体、从孤立走向嵌入的关键跃迁。那一天或许不会突然降临,但每一步前进,都让我们离那个机器真正“理解”并自如行动于我们世界的未来更近一点。
如若转载,请注明出处:http://www.1878070.com/product/56.html
更新时间:2026-01-13 17:17:26